
Agile Collaborative Robot
ABB:s first collaborative robot YuMi was released during the spring 2015. In my master-thesis I explore how this concept can be made more agile. The work was done together with ABB Robotics and Veryday.
Background
A new trend on industrial robotics market are collaborative robots. These robots enables collaboration between robots and humans, utilising better systems for Human Robot Interaction (HRI) and safety. This trend is growing because interest for high product customisation has arisen among customers. This requires flexible production systems that can swiftly switch between production of different product and batch sizes. HRI in production lines combines the robots precision, repeatability and strength with the humans intelligence and flexibility, allowing for this type of production.
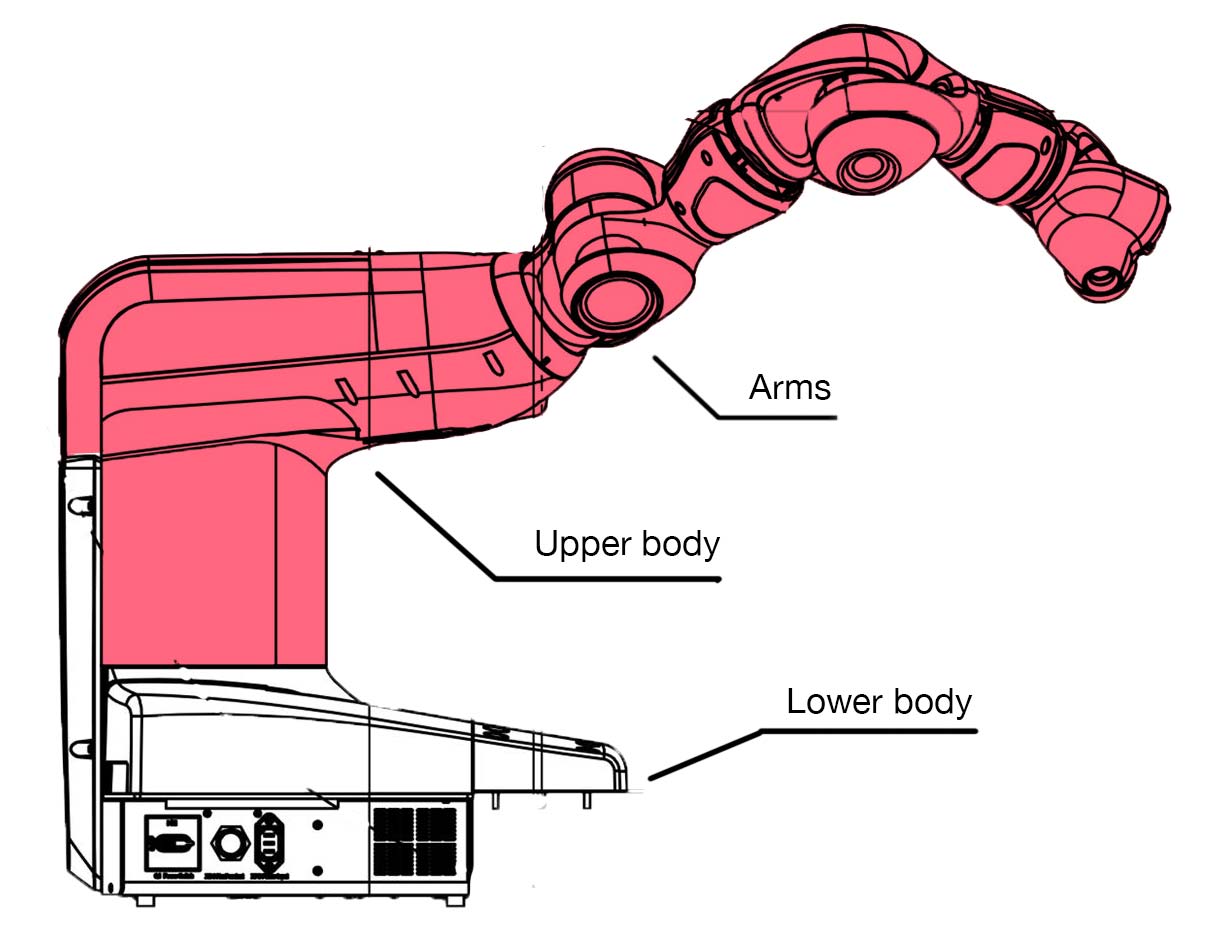
ABB:s first collaborative robot YuMi was released during the spring 2015. In my master-thesis I explore ways to make YuMi more agile and a "better co-worker" along with ABB and Veryday. The goal was to do this but keep some parts of the robot intact (upper body and arms).
The Work
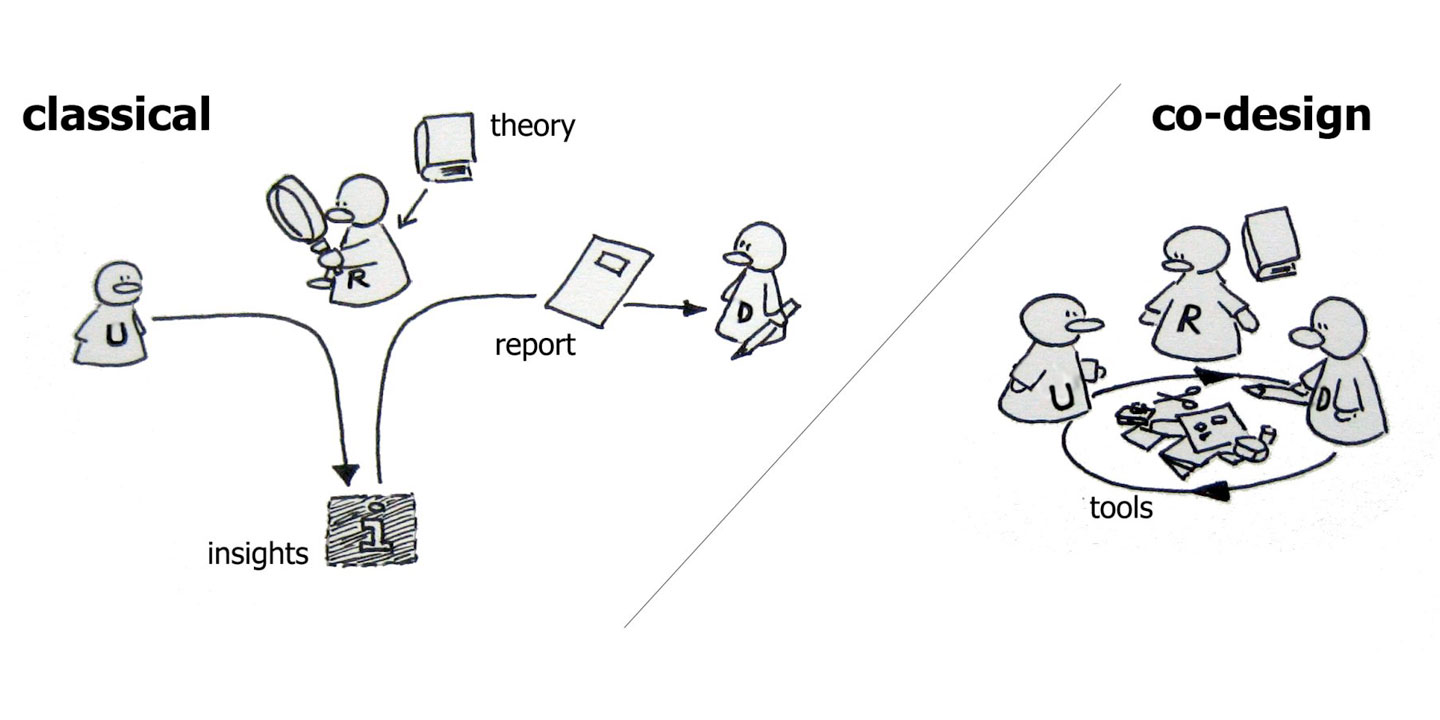
I used a method called co-design/co-creation to make a qualitative user study. In this method users are made a part of the design process and the researcher enable the users with tools and guidance. To be compared to a classic method where the researcher observes the users and makes conclusions from their behaviour.
With expert users (factory engineers, ABB-staff etc) this was done in video recorded workshops with open ended questions. The exact execution of the workshops was decided by the users. Some liked discussions and others liked to sit together with me and sketch concepts.
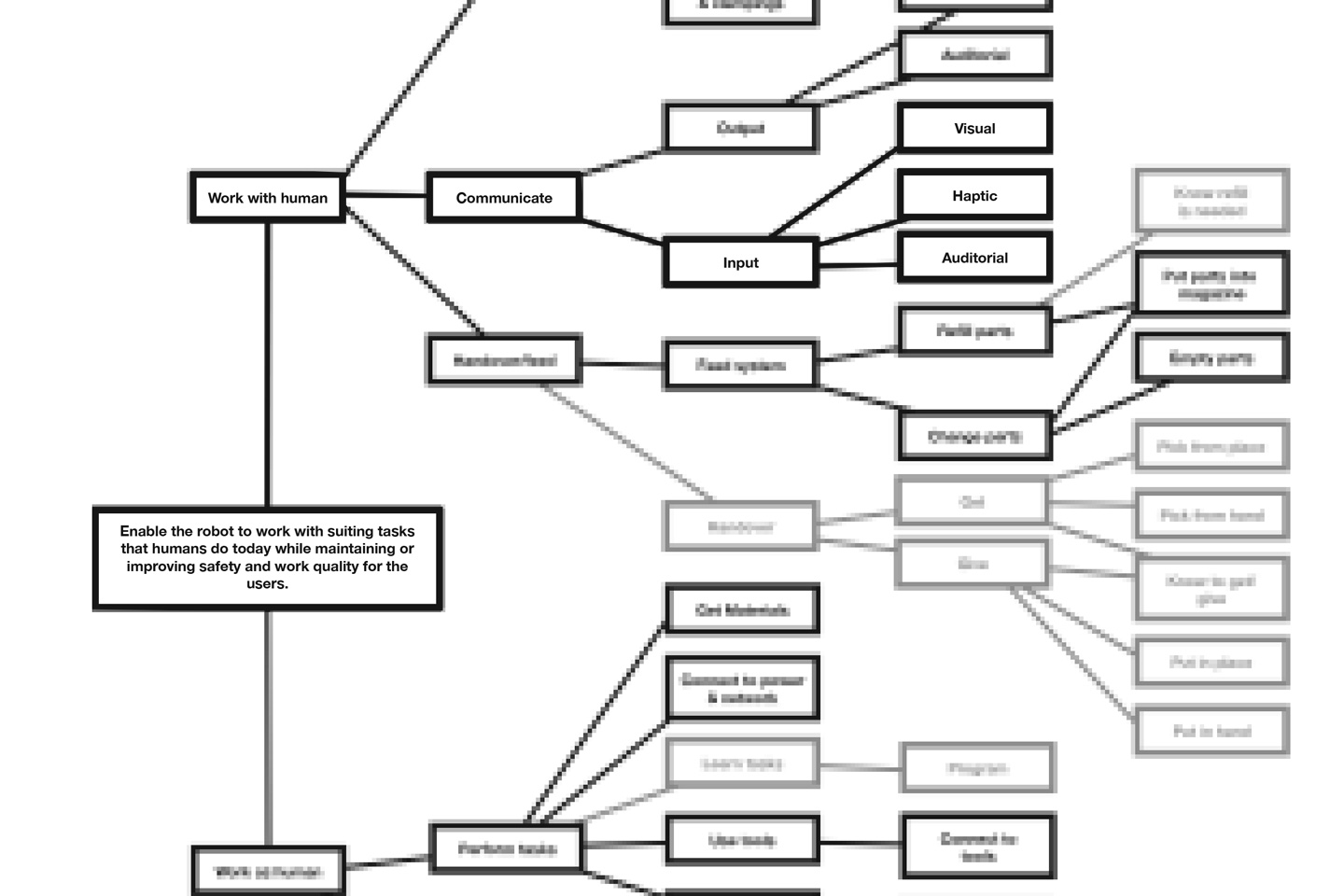
With normal users (machine operators and factory staff) I used simpler methods where they got to sort cards for different questions related to robotic co-workers like likability, what tasks they preferred that the robot should do and ways of controlling a robot.
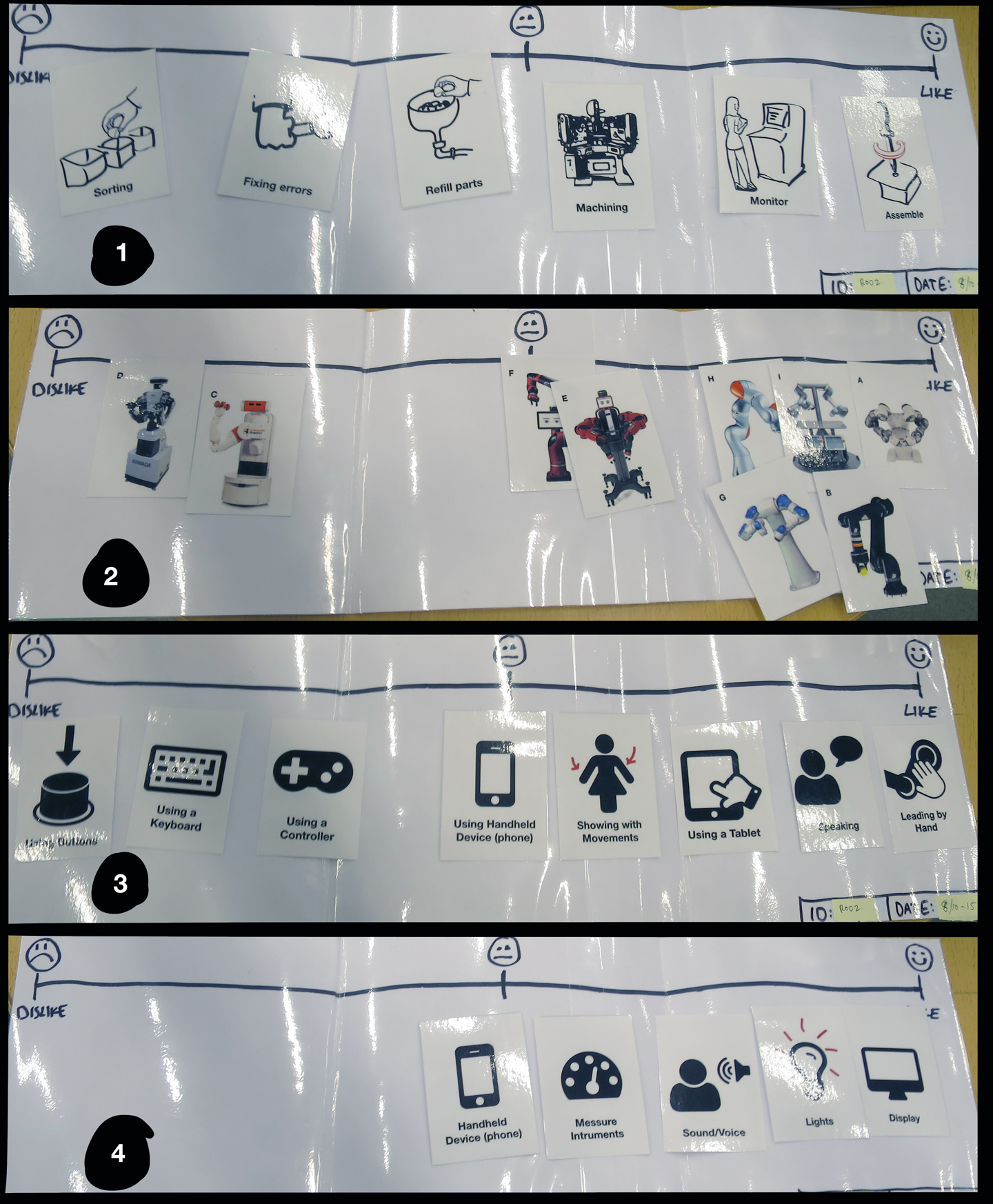
Although the sorting data was quantifiable the more important part was that the cards was something for the users to start from when thinking about robotic co-workers.
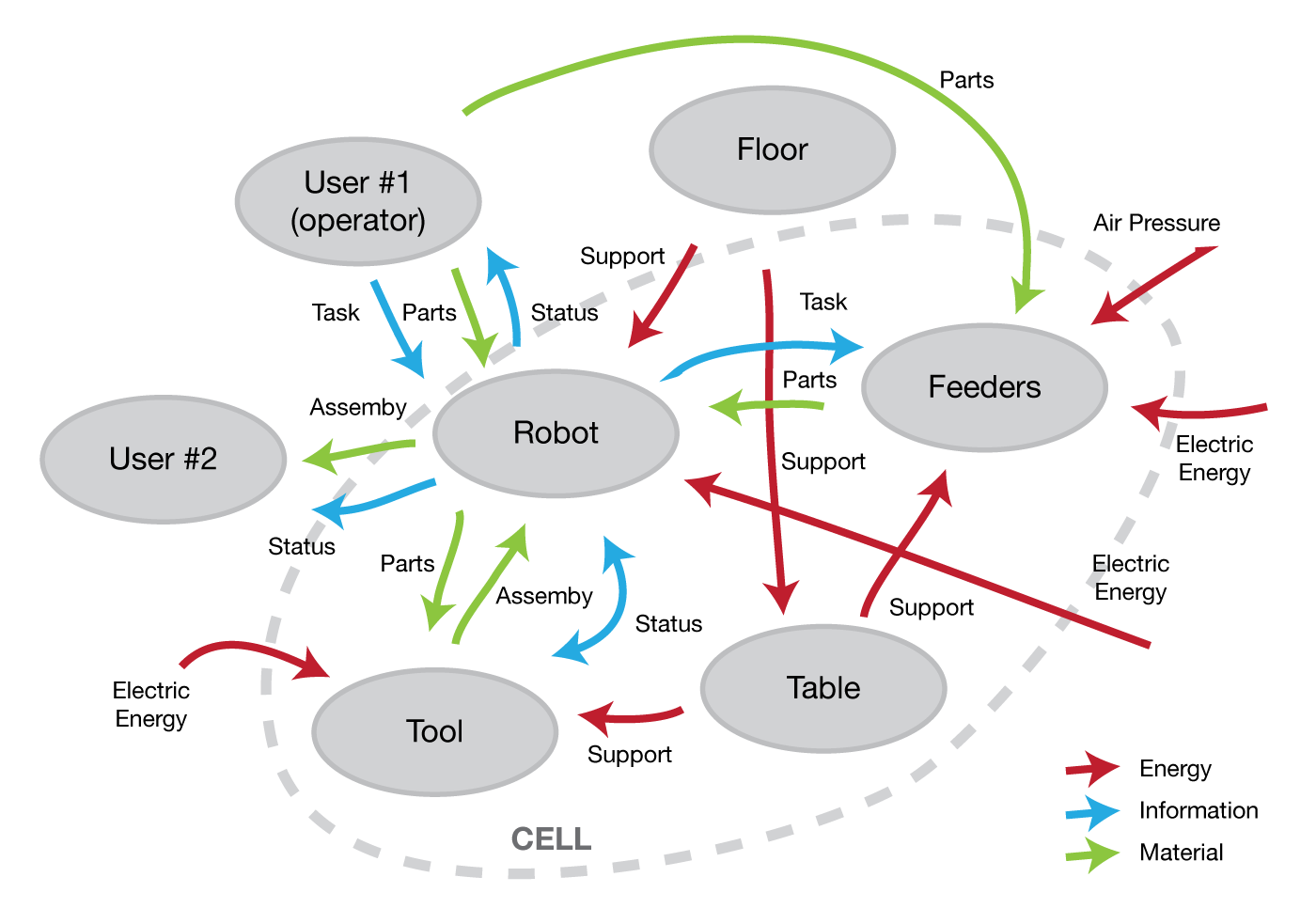
The gathered data was synthesised into function trees and system maps.
Functions tree (sensored). More general to the left (why) and more specific to the right (how/what).
Example of a system map for a robot collaborating with two users.
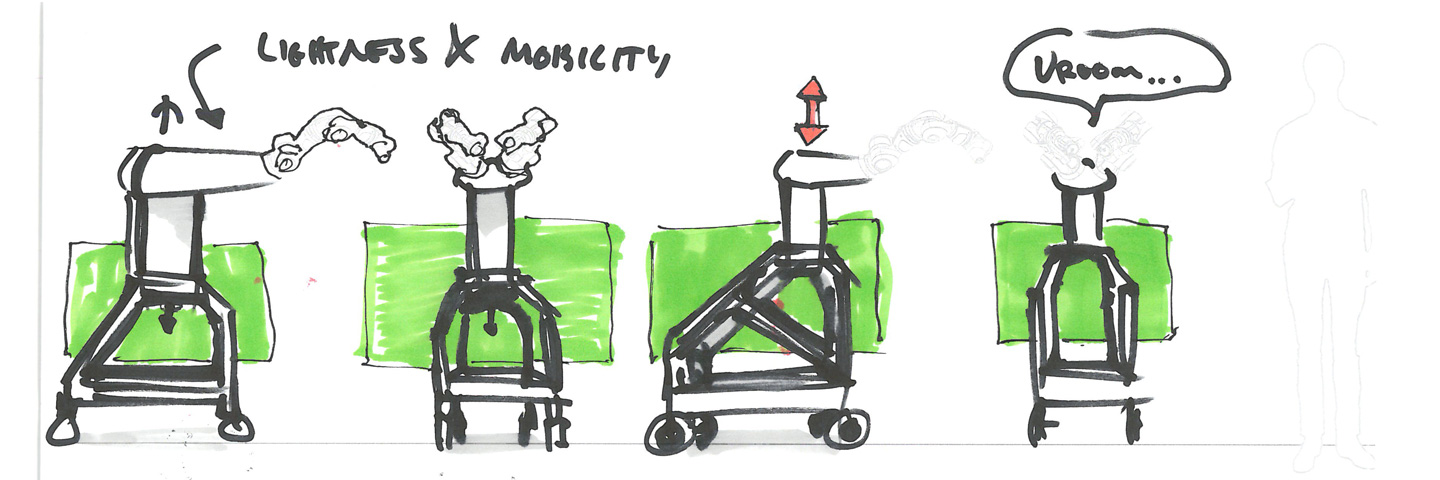
The findings where then developed into 6 different concepts (examples below). Some concepts could be combined with each other while others where exclusive.
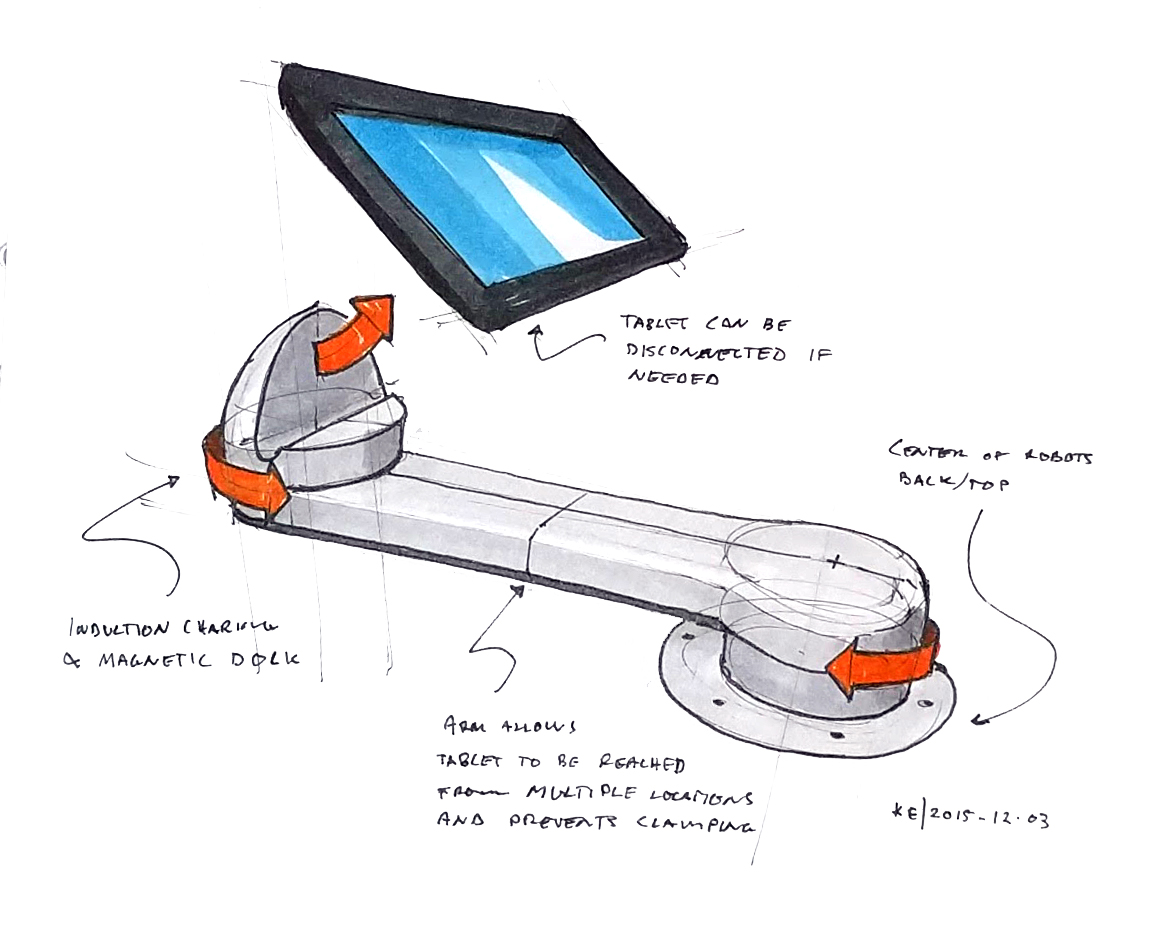
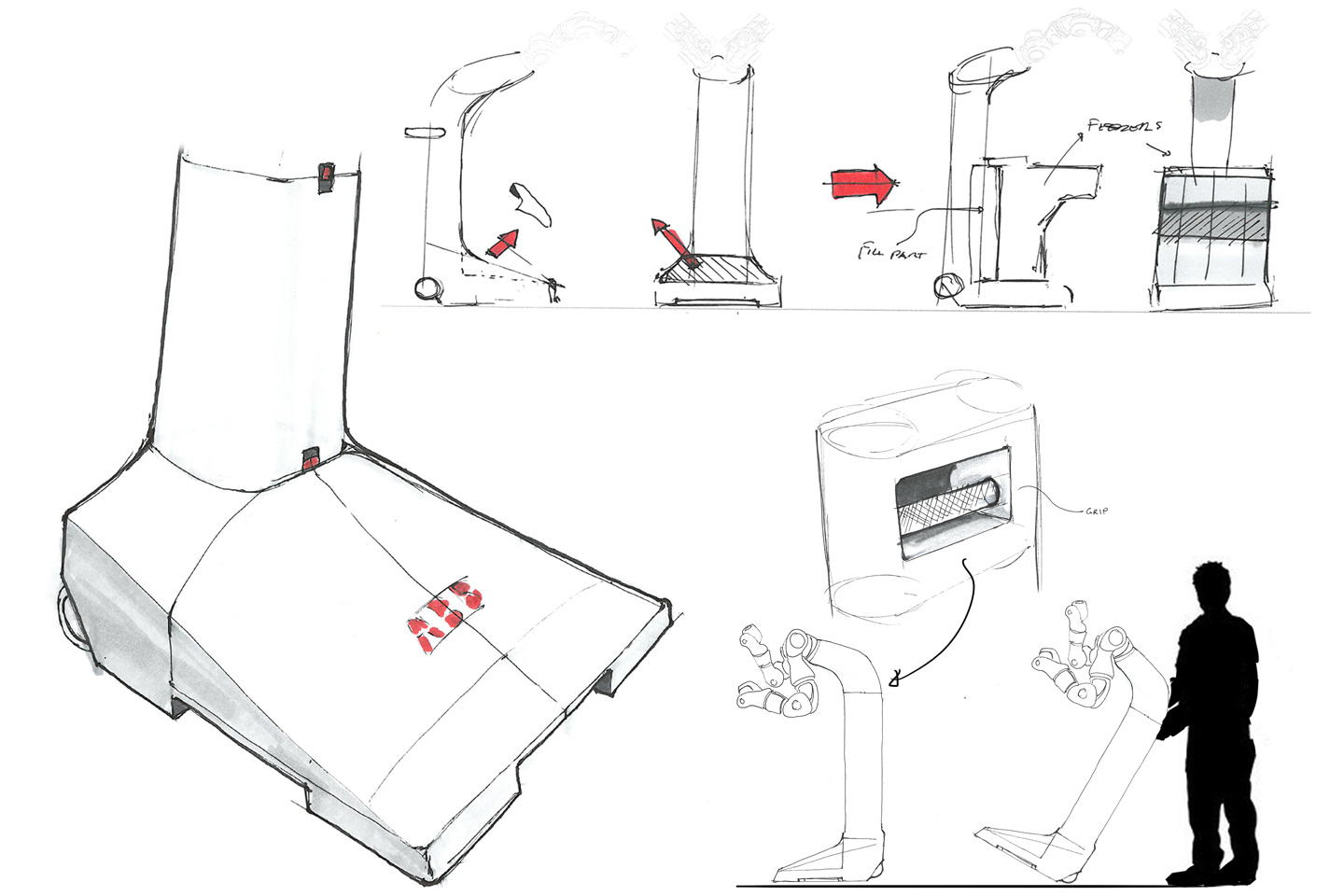
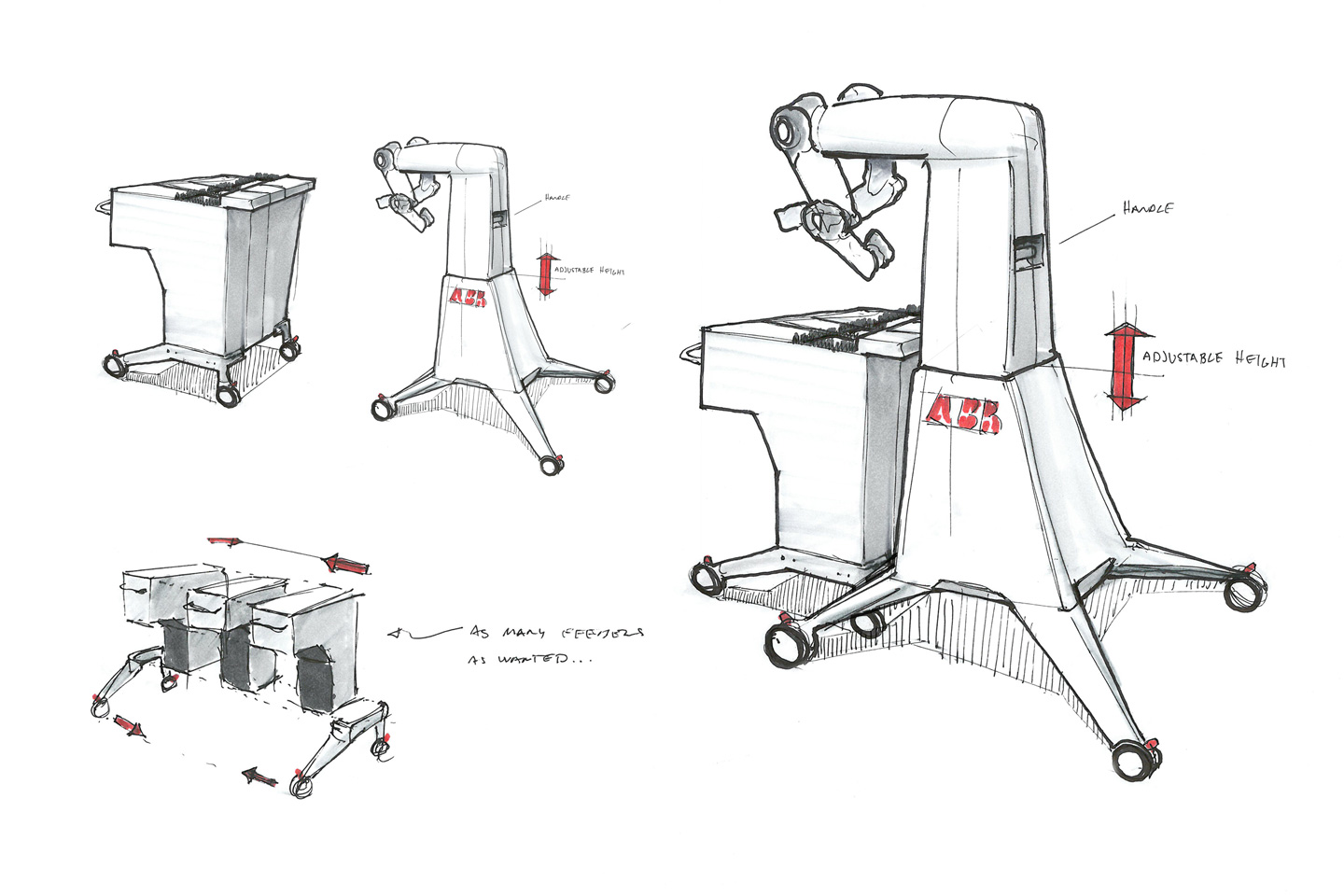
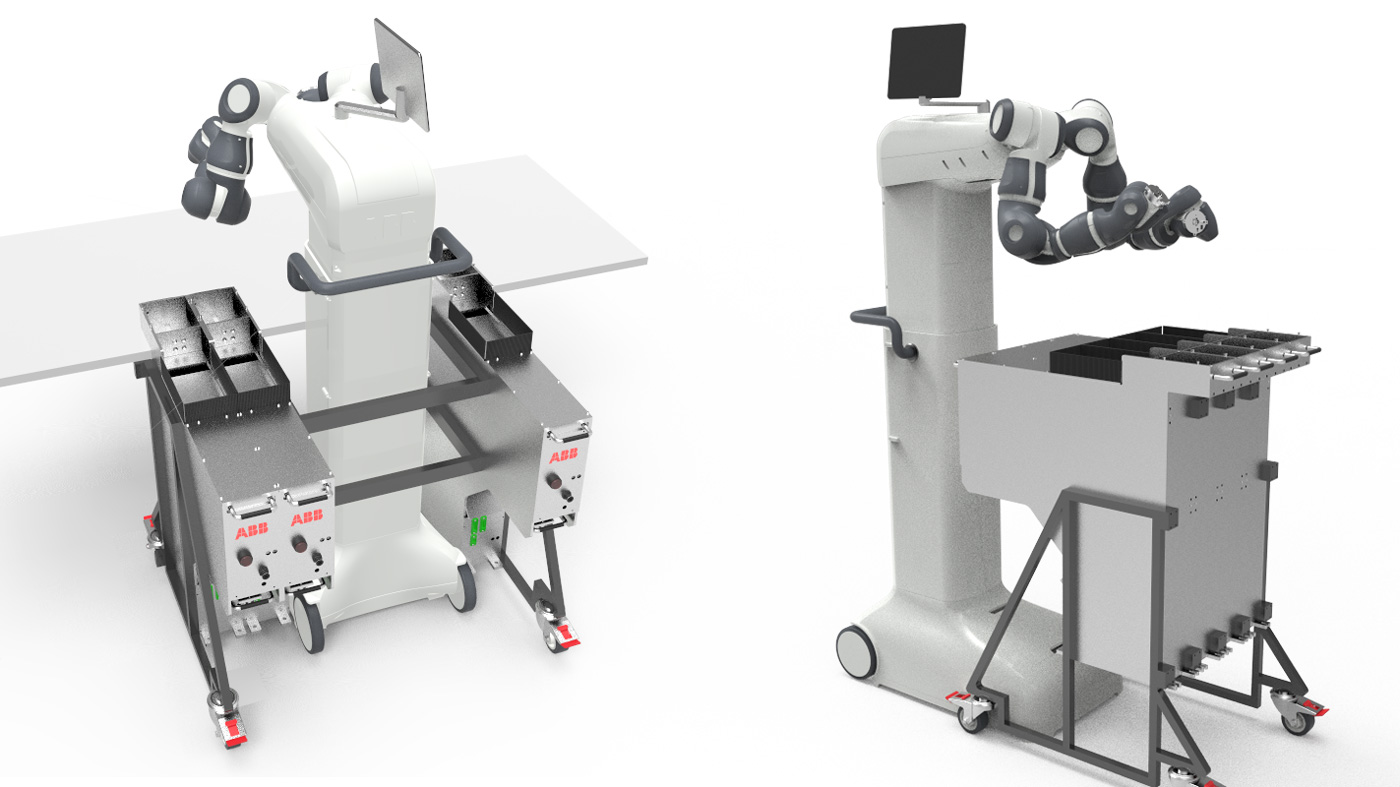
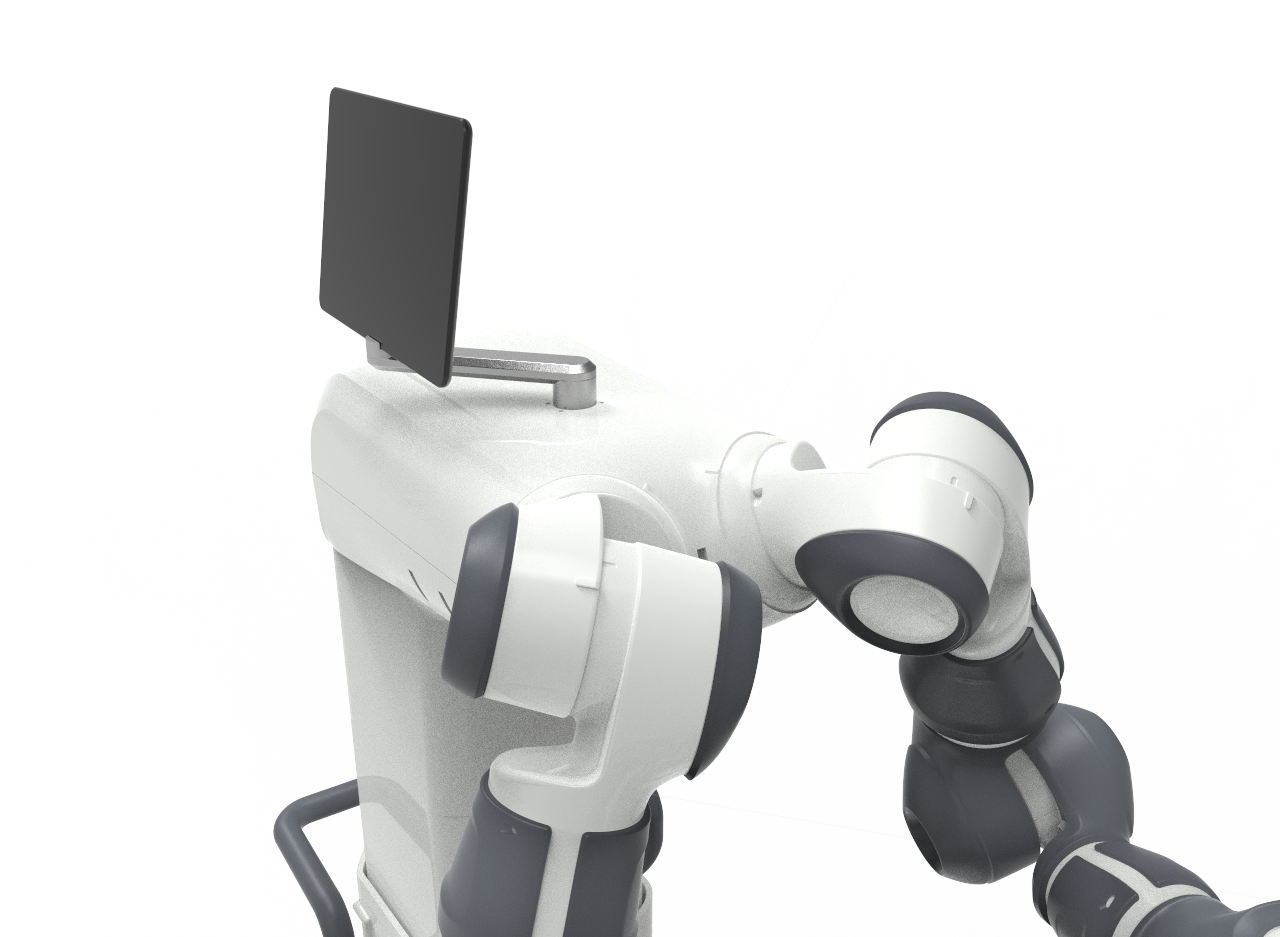
At the end the most promising concept was developed and rendered.
The Outcome
This was the first time ABB involved users in co-design for robots. The most important data and new ideas from the user studies. However the concepts that combined these ideas made it easy to discuss and communicate these ideas.

Collaborations
ABB Corporate Research in Sweden
Veryday
Acknowledgements
Adam Henriksson - Informal mentor at ABB
Camilla Kullborg - Supervisor at ABB
Fredrik Eriksson - Mentor at Veryday